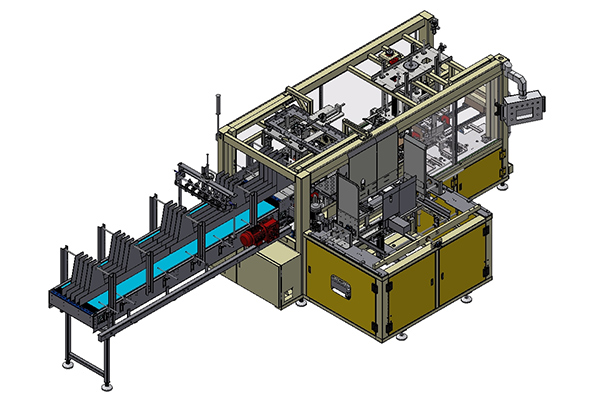
Xeta pakkirinê ya doza hevrêziya servo (bi dabeşkirina kartonê)

Xeta hilberîna pakkirinê ji parçekerek bilez, xeta veguhastina berheman, xeta veguhastina girtinê, Hbot, mekanîzmayeke tevgera du şaftî, xeta veguhastina qutiyan, mekanîzmayeke tespîtkirinê, girtina dabeşkirina kartonê, pergala xwarina dabeşkirina kartonê, koordînatek servo, girtina şûşeyan û çîtek parastinê pêk tê. Dabeşkera bilez berheman dike pir-xêz, di heman demê de mekanîzmaya tevgera du şaftî derbasbûna berheman leztir dike. Piştî ku berhem digihîje stasyona dabeşkirina kartonê, robota Scar dabeşkirina kartonê bar dike nav berhemên rêzkirî. Berhem digihîjin konveyora dabeşkirinê. Piştre, berhem bi girtina têne hildan û dixin nav qutiya kartonê, û konveyora qutiyê qutiya ku berhem tê de ye vediguhezîne derve.
Nexşeya pergala pakkirinê ya tevahî

Mîhengkirina sereke
| Destê robotê | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Motora servo | Siemens/Panasonic |
| VFD | Danfoss |
| Sensorê fotoelektrîkî | NEXWEŞ |
| Ekrana destdanê | Siemens |
| Amûrên voltaja nizm | Schneider |
| Rawesta paşîn | Phoenix |
| Pneumatîk | FESTO/SMC |
| Dîska mijandinê | PIAB |
| Bîlye | KF/NSK |
| Pompeya valahiyê | PIAB |
| PLC | Siemens / Schneider |
| HMI | Siemens / Schneider |
| Plaqeya zincîrê/zincîr | Intralox/rexnord/Regina |
Danasîna avahiya sereke




Bernameyên vîdyoyê yên zêdetir
- Pakêkera doza hevrêziya servo ji bo şûşeyên cam bi dabeşkirina kartonê