Sîstema Entegrasyonê ya Robotê Delta
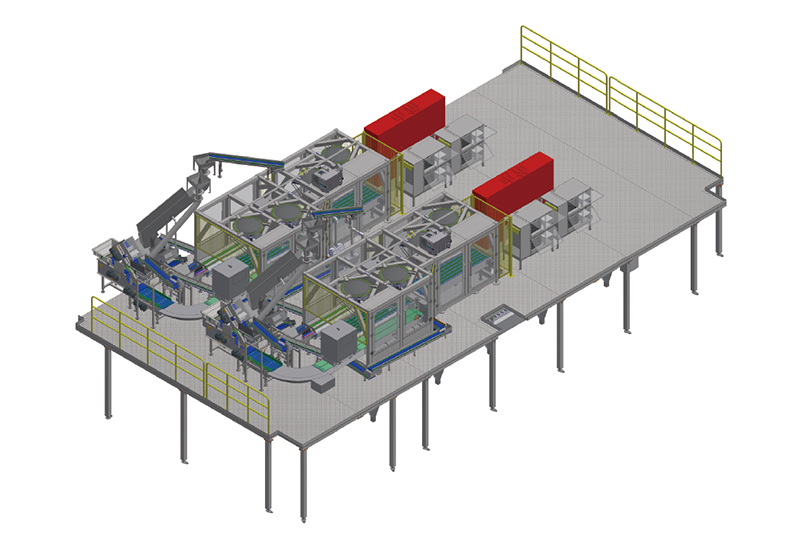
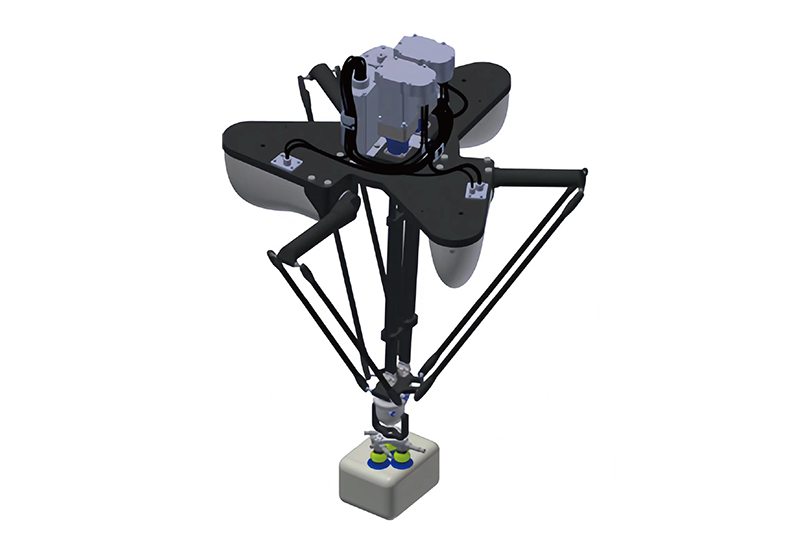
Berhemên pakkirina hundirîn ên ne rêzkirî ji depoyê tên derxistin. Piştî ku ji hêla servo unscrambler ve tên rêzkirin û pozîsyona hilberê ji hêla pergala dîtbarî ve tê naskirin. Di dema makîneya pakkirinê de, pergala dîtbarî dê agahdariyê bi robota spider re parve bike, û robota spider dê hilberan bigire û têxe nav pakkirina derveyî ya têkildar.
Bikaranînî
Ji bo rêzkirin, destnîşankirin û girtina berhemên pakêtkirina hundirîn ên nerêzkirî yên wekî şûşe, qedeh, bermîl, kîse, wek çaya şîrê toz, vermîşel, nîskên tavilê û hwd. guncaw e, û wan di nav pakêta derve de bi cih dike.
Xêzkirina 3D


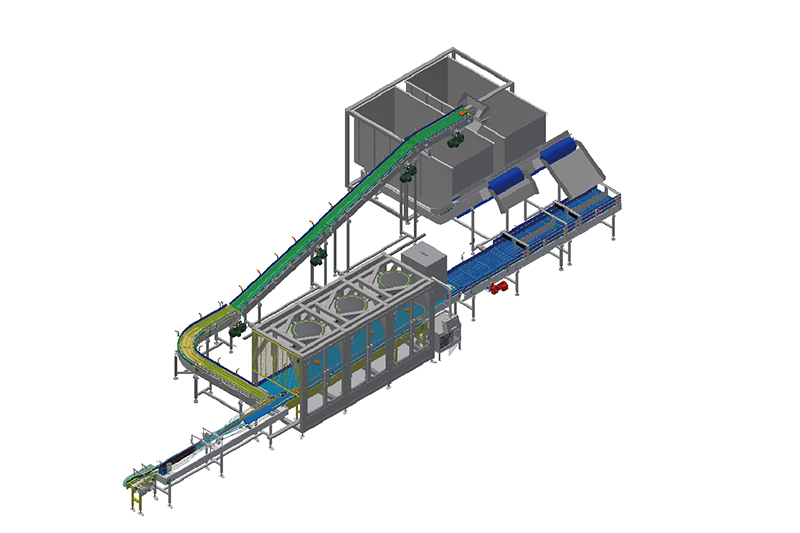
Xeta pakkirinê
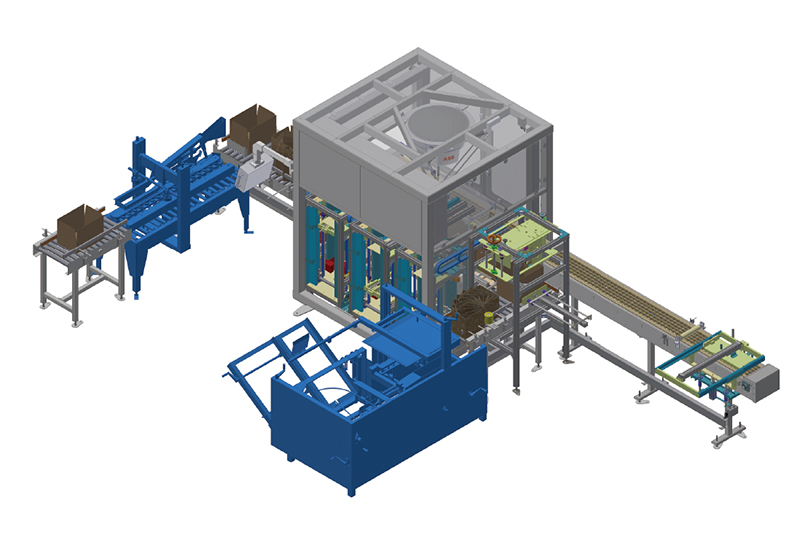
Xeta jihevdexistinê

Mîhengkirina Elektrîkî
| PLC | Siemens |
| VFD | Danfoss |
| Motora servo | Elau-Siemens |
| Sensorê fotoelektrîkî | NEXWEŞ |
| Parçeyên pneumatîk | SMC |
| Ekrana destdanê | Siemens |
| Amûrên voltaja nizm | Schneider |
| Rawesta paşîn | Phoenix |
| Motor | DIRÛN |
Parametreya Teknîkî
| Cins | LI-RUM200 |
| Leza sabît | 200 perçe/deqe |
| Navê min | 380 AC ±%10, 50HZ, 3PH+N+PE. |
Bernameyên vîdyoyê yên zêdetir
- Xeta rêzkirina, xwarinkirin, veqetandin û pakkirina qutiyan ji aliyê robotên Delta ve






